(1)(1.19) TeraRanger One/EVO测距仪
文章目录
前言
1 通过I2C与TeraRanger EVO连接
2 Mission Planner中的设置
3 测试传感器
4 参数说明
前言
TeraBee EVO 系列测距仪是基于红外飞行时间 (TOF) 技术的轻型距离测量传感器。与基于激光的激光雷达相比,它们的速度比超声波快得多,体积更小、重量更轻、所需功率更低,但室外距离也更短。

!Note
规格是在受控条件下测试得出的。强光、目标表面反射率和其他变量都会影响传感器的性能。非常明亮的阳光和低反射率目标(如草地)的组合会将最大距离缩短到 10m 或更短。有关更多信息,请参阅 <https://terabee.b-cdn.net/wp-content/uploads/2019/04/TeraRanger-Evo-60m-Test-Results-Report-Outdoor.pdf>`__
有关这些传感器的更多技术信息,请参见下文:
-
Evo 60m
-
Evo 40m
-
Evo 15m
-
Evo 3m
-
Evo Mini
已停产:
- Evo600Hz
- TeraRanger One
!Note
只有 ArduPilot 自动驾驶仪通过 I2C 协议支持这些测距仪。
1 通过I2C与TeraRanger EVO连接
TeraRanger EVO 传感器可通过随附的开放式电缆轻松连接到 Pixhawk 或其他 ArduPilot。
| EVO I2C backboard pins | Pixhawk I2C port pins |
| 1 Tx | |
| 2 Rx | |
| 3 GND | |
| 4 SDA | 3 SDA |
| 5 SCL | 2 SCL |
| 6 | |
| 7 VCC | 1 VCC |
| 8 GND | 4 GND |
| 9 |
!Note
除非已知自动驾驶仪端口有足够的电流能力,否则不要从自动驾驶仪端口供电。如果是这种情况,只需将测距仪的 SCL/SDA 线路连接到自动驾驶仪的同名 I2C 信号上即可。
!Note
有些测距仪的电流消耗超过 100ma,因此不应使用自动驾驶仪的 I2C 端口供电,而应使用外部 5V 稳压电源供电。
!Note
欲了解更多信息,请访问此链接 <Connection to Pixhawk autopilots TeraRanger Tower Evo | Terabee>`__
2 Mission Planner中的设置
要将 TeraRanger EVO 传感器用作测距仪,请连接 Mission Planner 并打开 CONFIG/Full Parameter List 菜单并进行设置:
- RNGFNDx_MAX_CM:该参数设置自动驾驶仪使用测距仪的最大距离;
- RNGFNDx_MIN_CM:该参数设置自动驾驶仪使用测距仪的最小距离;
- RNGFNDx_ADDR:48(用于 TeraRanger One)或 49(用于 EVO 系列),0 将禁用测距仪设置;
- RNGFNDx_TYPE:14;
- RNGFNDx_ORIENT:25(朝下)。如果用于避开目标(Object Avoidance)或天花板测距,而不是高度测距,请安装并选择适当的方向。
测距仪的数值如下所示:
| EVO60M | EVO40M | EVO15M | EVO3M | EVOMini | EVO600Hz | Terranger One | ||
| RNGFNDx_MAX_CM | 6000 | 4000 | 1500 | 300 | 330 | 800 | 1400 | |
| RNGFNDx_MIN_CM | 50 | 50 | 50 | 50 | 3 | 75 | 20 | |
| RNGFNDx_ADDR | 49 | 49 | 49 | 49 | 49 | 49 | 48 | |
| Power Required | 5V/330ma | 5V/330ma | 5V/330ma | 5V/330ma | 5V/50ma | 5V/190ma | 10-20V/120ma | |
| Notes | 1 | 1 | 1 | 1 | 1 | 2 | ||
1. 除非已知端口有足够的电流能力,否则不要从自动驾驶仪端口供电。
2. 需要 3.3V 至 5V 电平转换,以连接自动驾驶仪 I2C 信号。
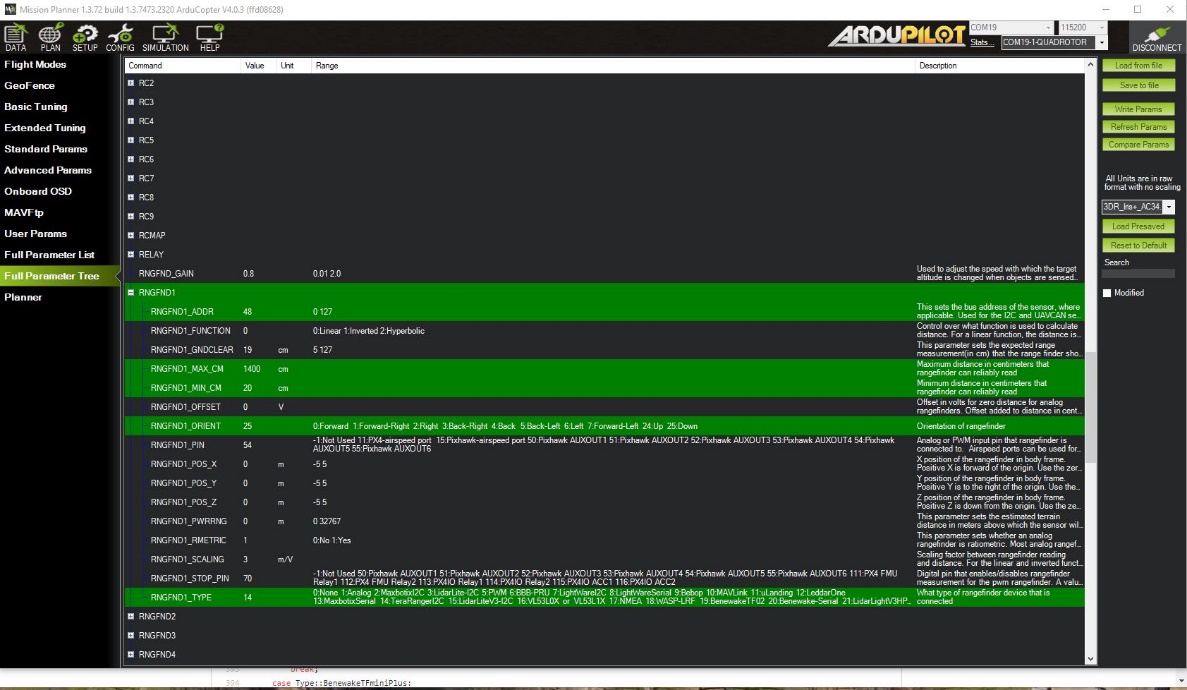
在自动驾驶仪上使用 TeraRanger One 传感器的 Mission Planner 设置
3 测试传感器
TeraRanger EVO 传感器读取的距离可显示在 Mission Planner 飞行数据菜单上。左侧的状态按钮将显示状态值。然后选择"sonarrange"。
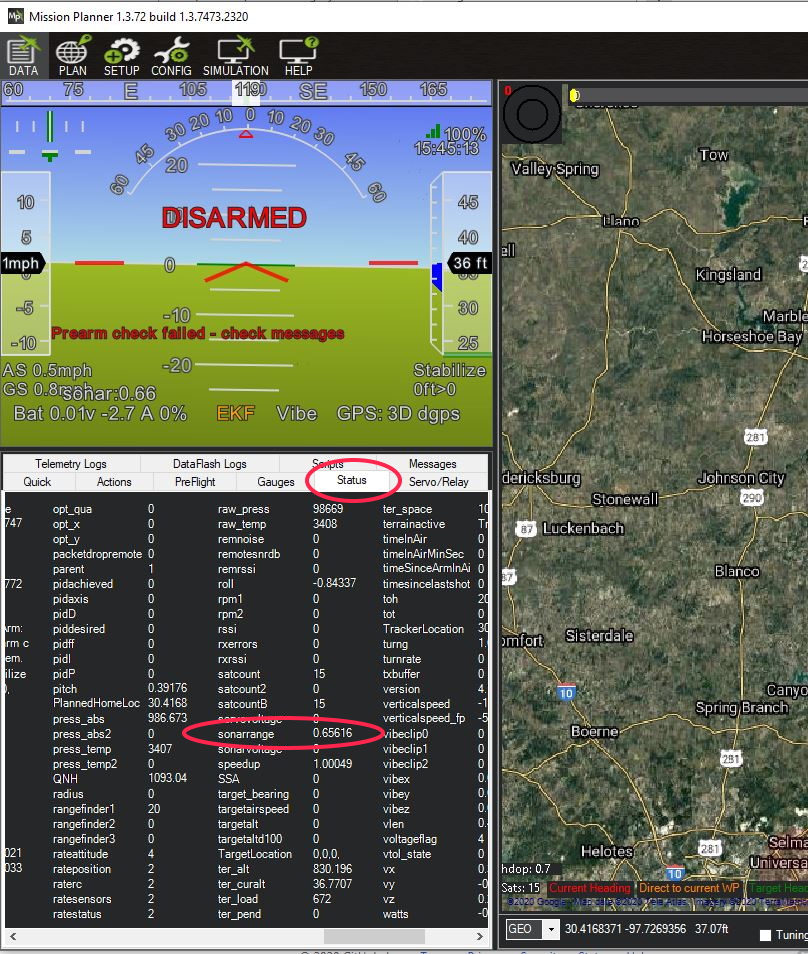
Mission Planner:在飞行数据屏幕上显示测距仪数据的设置
!Warning
自动驾驶仪启动时,测距仪必须已经接通电源,或者至少与自动驾驶仪同时接通电源。如果在自动驾驶仪启动后才给测距仪供电,测距仪将无法被识别,因为自动驾驶仪已经扫描了其 I2C 总线上的设备!
4 参数说明
1、RNGFND1_TYPE:测距仪类型
连接测距仪的类型。
| Values | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2、RNGFND1_MIN_CM:测距仪最小距离
测距仪能可靠读取的最小距离(厘米)。
| Increment | Units |
|---|---|
| 1 | centimeters |
3、RNGFND1_MAX_CM:测距仪最大距离
测距仪能可靠读取的最大距离(厘米)。
| Increment | Units |
|---|---|
| 1 | centimeters |